上汽斯柯达-明锐
购车QQ群:175381308

测试项目一:探测车位时的车速
下面将是我们的例行测试项目,首先进行的就是不同车速经过车位时对于探测车位带来的影响,通过这项测试我们将可以得知这套系统的极限探测车速是多少,同时也是对于雷达探测灵敏度的一个考验。我们进行第一次泊车时的车速是10km/h,我们以这个速度为基准,以每次增加10km/h的方式进行测试。
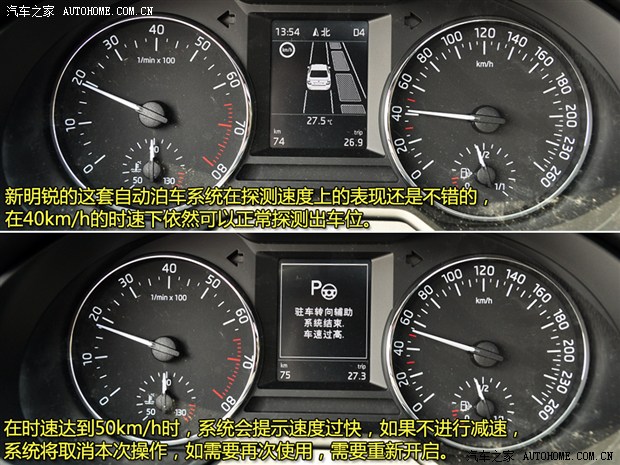

通过实验我们发现,这套系统对于车位探测时的速度限制还是比较宽泛的,在50km/h的时速下依然可以探测出车位,这样的表现也确实比较优秀了。但还是需要说明一下,平时我们在寻找车位时,车速一般都会很慢,并不会以实验中的车速进行探测,实验目的仅为测试车辆的识别率。网友请勿模仿。
测试项目二:车位的最小/最大间距
通过多次的测试,最终我们测得的最小车位间距是5350mm,这个距离要比新明锐车身长度多出了691mm(新明锐车身长度为4659mm),大概就是前后各30cm左右的富余,这样的距离表现已经可以应付大多数停车位了。

测试项目三:车身与车位间的最大间距
通过我们多次的实验,最终得到的结果是:车辆距离车位最小的间距只要小于2070mm,也就是大约2米距离,系统就可以正常识别出车位并且泊车入位。

测试项目四:车位另一侧有障碍物
在这个项目中,新明锐的表现还是比较不错的,最小920mm的距离要求,对于多数城市道路或是比较狭隘的小区内部路段来说,基本是可以应付的,实用性还是有所保障的。

★ 新功能:自动刹停
新明锐在这项测试上给了我们很大的惊喜,它是我们目前测试过的车型中比较少见的带自动刹停功能的车型之一,之前我们测试过的车型中,奔驰的S级和Jeep的自由光车型具备自动刹停功能,但从定位上来看,前两者的定位是远高于新明锐的。相比新明锐的定位来看,这套自动泊车系统的优势就非常明显了。
通过多次测试我们得出结论:当车辆尾部距离障碍物的距离小于15cm时车辆就会采取紧急制动措施,这项功能的加入可以极大程度的避免很多在泊车过程中容易发生的意外情况。

★ 新功能:自动驶出
相比我们之前测试过的一汽大众迈腾而言,新明锐的这套自动泊车系统增加了自动驶出功能,且这项功能并不依赖于必须要使用自动泊车系统泊入车位。简单来讲就是:即使你并没有使用自动泊车功能泊入车位,依然可以单独使用自动驶出功能将车辆开出车位,这样的设计从使用来看是很人性化的,可以照顾到更多人的使用习惯和需求。

新明锐在侧向泊车入位方面还是表现出了一定的水准,不仅识别率上保持了大众自动泊车系统一贯的水准,而且还加入了自动刹停功能,这项功能在复杂的城市路况中可以发挥极大的辅助安全作用,自动驶出功能也是照顾到了很多新手朋友们。下面我们继续进行体验,看看它在垂直泊车入位方面有着怎样的表现。
---------------------------------------------------------
免责声明:
1.本文援引自互联网,旨在传递更多网络信息,仅代表作者本人观点,与本网站无关。
2.本文仅供读者参考,本网站未对该内容进行证实,对其原创性、真实性、完整性、及时性不作任何保证。
3.除本站原创申明外的文章均来自互联网,如侵犯了您的版权请告之,我站将第一时间删除!
提示:支持键盘“← →”键翻页








